1.Problem
Evaluate each of the following iterated integrals.
Then integrate again, with the order of integration reversed, and
show that the same result is obtained.
(a)
⌠ ⌡
1
0
⌠ ⌡
y
0
y2dxdy
(d)
⌠ ⌡
1
0
⌠ ⌡
y
0
sin (x − y) dxdy
Solution
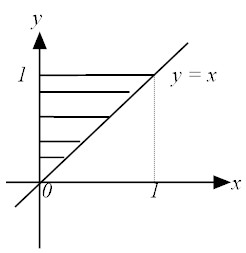
(a)
The area defined in the integral is
x
:
0 → y
y
:
0 → 1
⌠ ⌡
1
0
⌠ ⌡
y
0
y2dxdy
=
⌠ ⌡
1
0
[y2x]0y
(1)
=
⌠ ⌡
1
0
y3dy
(2)
=
1
4
.
(3)
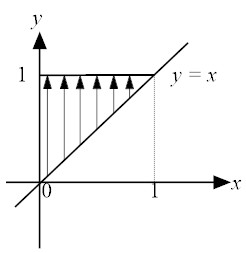
By exchanging the
order of integration, one obtains
y
: x → 1
x
: 0 → 1
⌠ ⌡
1
0
⌠ ⌡
1
x
y2dxdy =
⌠ ⌡
1
0
(
1
3
−
x3
3
) dx =
1
4
.
(d)
⌠ ⌡
2
1
⌠ ⌡
y
0
sin (x − y) dxdy =
⌠ ⌡
2
1
(−1 + cos y) dy = −1 − sin 1 + sin 2.
Alternatively, exchanging the order of integrals, one obtains
⌠ ⌡
1
0
⌠ ⌡
2
1
sin (x − y) dydx+
⌠ ⌡
2
1
⌠ ⌡
2
x
sin (x − y) dydx = (−2 sin 1 + sin 2) + (−1 + sin 2) = −1 − sin 1 + sin 2.
Both are the
same as expected. 2.Problem
Show that ∫T0 ∫t0x(τ) dτdt can be
reduced to the single integral ∫T0 (T − τ) s(τ) (T = constant). HINT: See the Comment at the end of Example 2. Solution
⌠ ⌡
T
0
⌠ ⌡
t
0
x(τ) dτdt
=
(changingtheorderofintegrals)
=
⌠ ⌡
T
0
⌠ ⌡
T
τ
x(τ) dtdτ
=
⌠ ⌡
T
0
(T−τ) x(τ) dτ.
(Note that x(τ) and t are independent each other). 3.
Show that
(a)
⌠ ⌡
6
0
⌠ ⌡
3
y/2
1
x
ey/xdxdy = 3 (e2 − 1)
(d)
⌠ ⌡
π/2
0
⌠ ⌡
π/2
x
sin y
y
dxdy = 1
Solution
(a)
⌠ ⌡
6
0
⌠ ⌡
3
y/2
1
x
ey/xdxdy
=
(changingtheorderofintegrals)
=
⌠ ⌡
3
0
⌠ ⌡
2x
0
1
x
ey/xdydx
=
⌠ ⌡
3
0
(e2−1) dx = 3(e2 − 1).
(d)
⌠ ⌡
π/2
0
⌠ ⌡
π/2
x
sin y
y
dydx
=
(changingtheorderofintegrals)
=
⌠ ⌡
π/2
0
⌠ ⌡
y
0
sin y
y
dxdy
=
⌠ ⌡
π/2
0
sin ydy = 1.
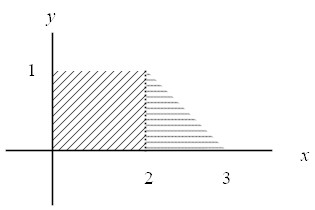
5.Problem(moments of inertia) Let σ(x, y) be the density of
distribution of mass over region R in the x,y plane;i,e.,
σ(x, y) is the mass per unit area at (x, y). Then the
moments of inertiaIx and Iy, about x, y axis,
respectively, are defined as
Ix =
⌠ ⌡
R
⌠ ⌡
y2σ(x, y)dA, Iy =
⌠ ⌡
R
⌠ ⌡
x2 σ(x, y)dA.
Evaluate Ix and Iy in each case. In parts (a) and (b),
σ(x, y) is a constant. say σ. Solution
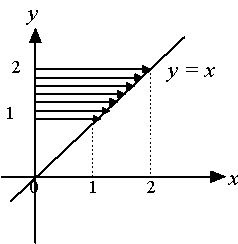
(a)
Ix
=
⌠ ⌡
2
0
⌠ ⌡
1
0
σy2dydx +
⌠ ⌡
3
2
⌠ ⌡
−x+3
0
σy2dydx
=
3
4
σ.
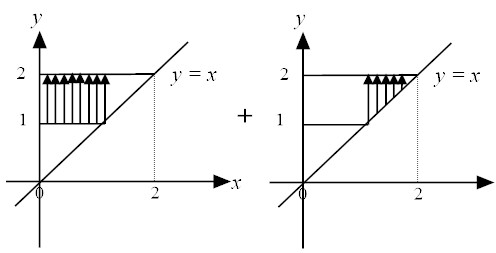
Iy
=
⌠ ⌡
2
0
⌠ ⌡
1
0
σx2dydx +
⌠ ⌡
3
2
⌠ ⌡
−x+3
0
σx2dydx
=
65
12
σ.
10.Problem
Evaluate each of the following iterated integrals.
(a)
⌠ ⌡
2
1
⌠ ⌡
3x
0
⌠ ⌡
x
2y
dzdydx
(d)
⌠ ⌡
3
−1
⌠ ⌡
z2
0
⌠ ⌡
0
πy
sin (
x
y
) dxdydz
Solution
No need to change the order of integrations.
(a)
⌠ ⌡
2
1
⌠ ⌡
3x
0
⌠ ⌡
x
2y
dzdydx
=
⌠ ⌡
2
1
⌠ ⌡
3x
0
(x−2y) dydx
=
⌠ ⌡
2
1
(−6x2) dx
=
−14.
(d)
⌠ ⌡
3
−1
⌠ ⌡
z2
0
⌠ ⌡
0
πy
sin (x/y) dxdydz
=
⌠ ⌡
3
−1
⌠ ⌡
z2
0
(−2y) dydz
=
⌠ ⌡
3
−1
(−z4) dz
=
−244/5.
11.Problem
Evaluate
I =
⌠ ⌡
1
0
⌠ ⌡
πz
0
⌠ ⌡
z
y/π
sin (
y
x
)dxdydz.
HINT: The x integration looks quite difficult, so try inverting
the full three-dimensional region of integration. Rather, a look at
the x,y plane (with z regarded as a (fixed) value,
between its limits of 0 and 1) will suffice since it is
the only the x and y integrations that we are interchanging. Solution
Just follow the hint.
I
=
⌠ ⌡
1
0
⌠ ⌡
πz
0
⌠ ⌡
z
y/π
sin (y/x) dxdydz
=
⌠ ⌡
1
0
⌠ ⌡
z
0
⌠ ⌡
πx
0
sin (y/x) dydxdz
=
⌠ ⌡
1
0
⌠ ⌡
z
0
(2x) dxdz =
⌠ ⌡
1
0
z2dz
=
1
3
.
13.Problem(Moments of inertia) Let σ(x, y, z) be the
density of a distribution of a mass over a region R in x,y,z
space [i.e., σ(x, y, z) is the mass per unit volume at
(x, y, z)]. Then the moments of inertiaIx, Iy, and
Iz, about the x,y,z axes, respectively, are defined as
Ix
=
⌠ ⌡
⌠ ⌡
R
⌠ ⌡
(y2+z2)σ(x, y, z)dV
Iy
=
⌠ ⌡
⌠ ⌡
R
⌠ ⌡
(x2+z2)σ(x, y, z)dV
Iz
=
⌠ ⌡
⌠ ⌡
R
⌠ ⌡
(x2+y2)σ(x, y, z)dV.
In each case evaluate Ix.
(a) R, σ as given in
the tetrahedron with vertices at
(1, 0, 0), (0, 2, 0), (0, 0, 1) and (0, 0, 0). Solution
(a) Ix = ∫∫∫(y2 + z2) σdV.
Note that the equation of plane that intercepts (1,0,0),
(0,2,0) and (0,0,1) can be expressed as
x + [(y)/2] + z = 1. Therefore, for a fixed value of
z, the above plane is projected to the x-y plane as
x + [(y)/2] = 1−z. On the x-y plane, the integration
scheme can be written as
x: 0 → (1−z)−[(y)/2], y: 0 → 2(1−z).
Ix
=
σ
⌠ ⌡
1
0
⌠ ⌡
2(1−z)
0
⌠ ⌡
1−z−[(y)/2]
0
(y2+z2) dxdydz
=
σ
⌠ ⌡
1
0
⌠ ⌡
2(1−z)
0
(1−
y
2
−z) (y2+z2) dydz
=
σ
⌠ ⌡
1
0
(
2 (1−z)4
3
+ (1−z)2z2 )dz
=
1
6
.
14.Problem
Determine the "?"integration limits. HINT: You can use
given limits to infer the region R. Sketching R, you can then
determine the new limits. However, then method might involve a
challenging three-dimensional sketch and would not work at all for
a quadruple integral, say, because R would then be
four-dimensional. Thus, we suggest that you use one or more
two-dimensional pictures. In part(a), for instance, only the y and
z integrations are being interchanged so it suffices to consider
the y, z plane. In part(b) you can accomplish the desired change
in the order of integration by using two successive interchanges,
as follows: xyz → yxz → yzx The first
interchange requires a look at the x, y plane only, and
the second interchange requires a look at the x, z plane only.
(a)
⌠ ⌡
1
0
⌠ ⌡
z
0
⌠ ⌡
z
0
f(x, y, z) dxdydz =
⌠ ⌡
?
?
⌠ ⌡
?
?
⌠ ⌡
?
?
f(x, y, z) dxdzdy
(d)
⌠ ⌡
2
0
⌠ ⌡
z
0
⌠ ⌡
2
z
f(x, y, z) dxdydz =
⌠ ⌡
?
?
⌠ ⌡
?
?
⌠ ⌡
?
?
f(x, y, z) dydzdx
Solution
(a) Exchange the order of integration from
(x → y → z)
to
(x → z → y)
as
y: 0 → z, z:0 → 1 to
z: 0 → 1, y: 0→ 1.
⌠ ⌡
1
0
⌠ ⌡
z
0
⌠ ⌡
z
0
f(x, y, z) dxdydz =
⌠ ⌡
1
0
⌠ ⌡
1
y
⌠ ⌡
z
0
f(x, y, z) dxdzdy.
(4)
(d) It is necessary to take two steps to achieve the
desired order of integration, i.e. x ↔ y and
x ↔ z.
First, (x: z → 2, y: 0→ z) can be changed to
(y:0 → z, x: z→ 2). Thereby,
⌠ ⌡
2
0
⌠ ⌡
z
0
⌠ ⌡
2
z
f(x, y, z) dxdydz
=
⌠ ⌡
2
0
⌠ ⌡
2
z
⌠ ⌡
z
0
f(x, y, z) dydxdz
=
⌠ ⌡
2
0
⌠ ⌡
x
0
⌠ ⌡
z
0
f(x, y, z) dydzdx.
Section 15.4
6.Problem
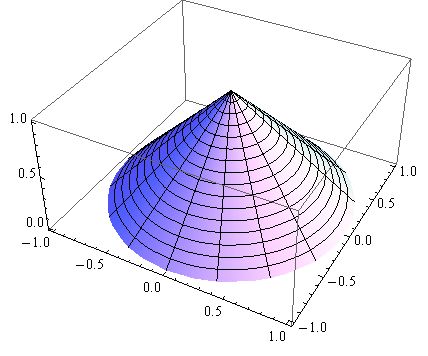
Consider the parameterization
x=(1−u)cos v, y=(1−u)sin v, z=u,
over 0 < u < 1, 0 ≤ v < 2π.
(a) Eliminating u and v from (6.1), obtain a nonparametric
representation of the surface S, and show
S in a neat, labeled sketch. Identify
S. (For example, is it a plane ? A
sphere?...)
(c) Evaluate
∧n using (9). Show that there is one point on
S at which (10) is not satisfied. Does
S admit a unique normal line at that point?
(d) Find the equation of the tangent plane τ at
u=[1/2], v=0. Sketch τ and S Solution
(a) x = (1−u) cos v, y=(1−u) sin v, z=u. By eliminating
u and v, one gets
(
x
1−z
)2 + (
y
1−z
)2 = 1
which
represents a cone.
(b) (skipped).
(c) Ru = (− cos v, −sin v, 1) and
Rv = (−(1−u) sin v, (1−u) cos v, 0).
Ru ×Rv = ((u−1) sin v , (1−u) sin v, u−1) and
|| Ru ×Rv||2 = 2(u−1)2. Therefore,
n = (
cos v
√2
,
sin v
√2
,
1
√2
).
(d) At u = 1/2, v=0,
(x, y, z)=(1/2, 0, 1/2) and n = (1/√2, 0, 1/√2).
Therefore, the equation is
1
√2
(x −
1
2
)+0 (y−0)+
1
√2
(z −
1
2
) = 0
or
x + z = 1.
7.Problem
Consider the parameterization
x = a cos u, y = b sin u, z = v2,
over 0 ≤ u < 2 π, 0 < v < 3.
(a) Sketch S, and verify that it is an elliptic cylinder Solution
(a)
(
x
a
)2+(
y
b
)2 = 1
with 0 ≤ z ≤ 9.
(b) (skipped). 11.Problem
Find a normal ∧n and the equation of tangent plane
for the given surface S and a point
P: if a unique normal line and tangent plane do
not exist at that point then state that.
(a)
S: z = x2 + y2, P=(2, 1, 5)
(d)
S: x = yz, P=(3, −1, −3)
Solution
(a) By taking total derivative of x2 + y2 − z = 0, one gets
2 xdx + 2 ydy − dz = 0 which implies that the vector, (2 x, 2 y,−1)|(2, 1, 5) = (4, 2, −1) is perpendicular to the line element on the
plane. Therefore, (4, 2, −1) ·(x − 2, y − 1, z − 5) = 0 which is equivalent
to 4 (x − 2) + 2 (y − 1) − (z − 5) = 0 or
4 x + 2 y − z = 5
.
(d) By taking total derivative of x − yz = 0, one gets
dx − dyz − ydz = 0 which implies that the vector, (1, −z,−y)|(3, −1, −3) = (1, 3, 1) is perpendicular to the line element on the
plane. Therefore, (1, 3, 1) ·(x − 3, y + 1, z + 3) = 0 which is equivalent
to (x − 3) + 3 (y + 1) + (z + 3) = 0 or
x + 3 y + z = − 3
.
Section 15.5
3.
(This problem can be skipped.)
Problem
Let S be the one-sheeted hyperboloidx2 + y2 − z2 = 1
between z = 0 and z = h.
(a) Show that
A = π
⎡ ⎣
h
√
1 + 2 h2
+
1
√2
ln
⎢ ⎢
√2h +
√
1 + 2 h2
⎢ ⎢
⎤ ⎦
.
(b) Applying the Taylor series to (3.1), show that A ∼ 2πh
as h → 0. Explain why this result looks correct
[and hence provides us with a partial check on (a)]. Solution
(a)
Solving for z yields
This result is comparable with the side area of a ring with the radius of 1 and
the height of h. 5.
Parameterizing the circular cylinder x2 + y2 = a2 by
x = a cos v, y = a sin v, z = u, show that the area element is.
Interpret this result geometrically, with a labeled
sketch. Solutionx = a cos v, y = a sin v, z = u.
Ru = (0, 0, 1) and
Rv = (−a sin v , a cos v, 0).
EG − F2 = a2.
Therefore, dA = adudv. 6.Problem
Find the area A of the following regions in
the x, y plane:
(a) the region enclosed by r = sin θ (0 ≤ θ < π)
(b) the region enclosed by the limacon r = 2 + cos θ (0 ≤ θ < 2π)
(c) the region enclosed by one leaf of the "daisy" r = 2 sin 2 θ
(d) the region (in the second quadrant) between the circle
r = sin θ(0 ≤ θ < π) and the cardioid r = 1 + cos θ(0 ≤ θ < 2 π) Solution
(a) dA = rdrdθ where
0 ≤ r ≤ sin θ,
0 ≤ θ ≤ π.
Therefore,
A
=
⌠ ⌡
π
0
(
⌠ ⌡
sin θ
0
rdr) dθ
=
π
4
.
8.
Use (19) to show that the surface area of the paraboloid
z = h (1 − x2 − y2), between z = 0 and z = h, is
A =
⌠ ⌡
⌠ ⌡
R
√
1 + 4 h2 (x2 + y2)
dxdy,
where R is the unit disk x2 + y2 ≤ 1. To integrate (8.1),
change to polar coordinates r, θ, and show that
A =
π
6 h2
[ (1 + 4 h2)3/2 − 1].
As a partial check on (8.2), show that the right-hand side of
(8.2) trends to π (namely, the area of the unit disk) as h→ 0. Solutionz = h (1 − x2 − y2) and zx = −2 hx, zy = −2 hy.
1 + zx2 + zy2 = 1 + 4 h2 (x2 + y2). Therefore,
dA =
√
1 + 4 h2 (x2 + y2)
dxdy.
A
=
⌠ ⌡
⌠ ⌡
x2 + y2 ≤ 1
√
1 + 4 h2(x2 + y2)
dxdy
=
⌠ ⌡
2π
0
⌠ ⌡
1
0
√
1 + 4 h2r2
rdrdθ
=
π
6 h2
(
√
1 + 4 h2
(1 + 4 h2) − 1).
When h→ 0, (1 + 4 h2)3/2 ∼ 1 + 6 h2. Therefore, A ∼ π. 10.
Evaluate ∫∫S(1 + x)dA, where the surface
S is
(a) the plane z = 1 + y with vertices at (0, 0, 1), (1, 0, 1), (1, 1, 2) and (0, 1, 2).
(c) the cylinder x2 + y2 = 1, between z = 0 and z = h Solution
(a)
dA
=
√
1 + zx2 + zy2
dxdy
=
√2 dxdy,
⌠ ⌡
⌠ ⌡
(1 + x) dA
=
⌠ ⌡
⌠ ⌡
√2 (1 + x) dxdy
=
√2
⌠ ⌡
1
0
⎛ ⎝
⌠ ⌡
1
0
(1 + x)dx
⎞ ⎠
dy
=
3√2
2
.
(c) The total area is divided into three, the top and the bottom
and the side.
For the top:
R = (r cos θ, rsin θ, h),
so
dA = rdrdθ,
and
⌠ ⌡
⌠ ⌡
(1+x)dA
=
⌠ ⌡
2π
0
⌠ ⌡
1
0
(1+ r cos θ) rdrdθ
=
π.
For the bottom:
R = (r cos θ, rsin θ, 0),
so
dA = rdrdθ,
and
⌠ ⌡
⌠ ⌡
(1 + x)dA
=
⌠ ⌡
2π
0
⌠ ⌡
1
0
(1 + r cos θ) rdrdθ
=
π,
and for the side,
R = (cos θ, sin θ, z).
(note that the two parameters are θ and z.)
eθ =
∂R
∂θ
=
⎛ ⎜ ⎜
⎜ ⎝
−sin θ
cos θ
0
⎞ ⎟ ⎟
⎟ ⎠
, ez =
∂R
∂z
=
⎛ ⎜ ⎜
⎜ ⎝
0
0
1
⎞ ⎟ ⎟
⎟ ⎠
.
so
E
=
eθ ·eθ = 1
F
=
ez ·ez = 1
G
=
eθ ·ez = 0
so
dA =
√
EF−G2
dθdz = dθdz,
so
A
=
⌠ ⌡
h
0
⌠ ⌡
2π
0
(1 + cos θ) dθdz
=
2πh.
The total area, therefore, is
2 π+ 2 πh.
11.Problem
(Mass and center of gravity) Let σ be the
mass density of a (negligibly thick) distribution of mass over a
surface S. That is, σ is the mass per
unit area at each point on S: it may vary over
S. Then the x, y, z coordinates of the
center of gravity are defined
xc
=
1
M
⌠ ⌡
⌠ ⌡
S
x σdA,
yc
=
1
M
⌠ ⌡
⌠ ⌡
S
y σdA,
zc
=
1
M
⌠ ⌡
⌠ ⌡
S
z σdA,
where
M =
⌠ ⌡
⌠ ⌡
S
σdA
is the total mass. Evaluate xc in each case. (You need not
evaluate yc, zc.)
(a) S is the plane surface z = x + 2 y with
vertices at (0, 0, 0), (1, 0, 1), (0, 1, 2):σ = constant = σ0.
Solution
(a) z = x + 2 y, zx = 1, zy = 2 and 1 + zx2 + zy2 = 1 + 1 + 4 = 6,
dA = √6 dxdy. Therefore,
xc
=
√6 σ0
M
⌠ ⌡
⌠ ⌡
xdxdy
=
(x:0 → 1 − y,y:0 → 1)
√6 σ0
M
⌠ ⌡
1
0
⌠ ⌡
1 − y
0
xdxdy
=
√6 σ0
M
⌠ ⌡
1
0
(1 − y)2
2
dy
=
√6 σ0
M
1
6
=
σ0
√6 M
.
Section 15.6
1.Problem
Compute the volume of a sphere of radius R by triple
integration:
(a) using cylindrical coordinates
(b) using spherical coordinates.
Solution
(a)
x2 + y2 + z2 = R2. Let
x = r cos θ, y = r sin θ and z = √{R2 − r2}.
dxdydz = rdrdθdz
where
z
:
0 →
√
R2 − r2
r
:
0 → R
θ
:
0 → 2π
⌠ ⌡
2π
0
⌠ ⌡
R
0
r
√
R2 − r2
drdθ = 2πR3/3.
(b)
dV = ρ2 sin ϕdρdϕdθ.
V
=
⌠ ⌡
R
0
ρ2dρ
⌠ ⌡
π
0
sin ϕdϕ
⌠ ⌡
2π
0
dθ
=
4
3
πa3.
File translated from
TEX
by
TTH,
version 4.03. On 01 Oct 2022, 10:50.
 Solution
(a)
Solution
(a)
 (b) (skipped).
(b) (skipped).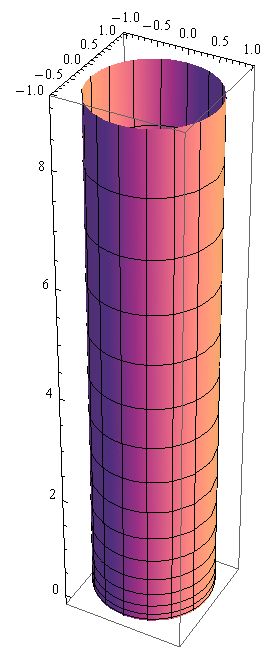 (b) (skipped).
(b) (skipped).