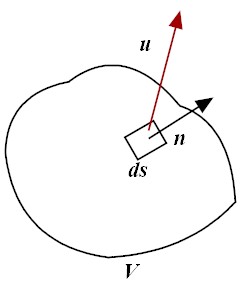
where n is the normal (outward) perpendicular to the boundary.
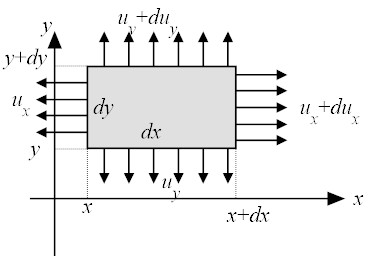
Thus, the flow that goes out from the side at x = x is
u ·ndy =
⎛ ⎜
⎜ ⎝
ux(x, y)
uy(x, y)
⎞ ⎟
⎟ ⎠
·
⎛ ⎜
⎜ ⎝
−1
0
⎞ ⎟
⎟ ⎠
dy = − ux(x, y) dy,
(2)
and the flow that goes out from the side x = x + dx is
u ·ndy =
⎛ ⎜
⎜ ⎝
ux(x + dx, y)
uy(x + dx, y)
⎞ ⎟
⎟ ⎠
·
⎛ ⎜
⎜ ⎝
1
0
⎞ ⎟
⎟ ⎠
dy = ux(x + dx, y) dy,
(3)
so the net flow that goes out from the element in the x-direction is
(ux(x + dx, y) − ux(x, y)) dy
=
⎛ ⎝
ux(x, y) +
∂ux(x, y)
∂x
dx + …−ux(x, y)
⎞ ⎠
dy
=
∂ux
∂x
dxdy.
(4)
Similarly, the net flow that goes out from the element in the
y-direction is
∂uy
∂y
dxdy.
(5)
Addition of eqs.(4, 5) is the net amount of flow
that goes out from the element, i.e.
(
∂ux
∂x
+
∂uy
∂y
) dxdy = ∇·udxdy.
(6)
Heat conduction
The net heat that goes out of an element is
∇·hdxdy,
(7)
where h is the heat flux vector (heat per second). The rate
of heat loss in the element is (note the minus sign)
−ρCp
∂T
∂t
dxdy,
(8)
where ρ is the mass density and Cp is the specific heat so
∇·hdxdy = −ρCp
∂T
∂t
dxdy.
(9)
The Fourier law of heat conduction stipulates that the heat flux is
proportional to the gradient of the temperature, i.e.
h = − k ∇T,
(10)
where k is the thermal conductivity.
By combining Eq.(9) with Eq.(10), one obtains
∇·( k ∇T) = ρCp
∂T
∂t
.
(11)
Equation (11) is known as the transient heat conduction
equation.
Equation of continuity
The amount of mass that flows out of an element is
∇·(ρv),
(12)
which must be equal to the mass loss per unit time of
−
∂ρ
∂t
,
(13)
which yields
∂ρ
∂t
+ ∇·(ρv) = 0.
(14)
which is known as the equation of continuity.
Directional derivative (gradient)
The directional derivative, ∂u/∂n,
of a function, u, in the direction of n is defined as
∂u
∂n
≡ ∇u ·n,
(15)
where the vector, n, is a unit vector which represents the direction
of the change of rate of v. Note that if n is in the direction of
the x axis, ∂u/∂n = ∂u/∂x.
Example:
Compute the directional derivative of u=x2y −3 xz in the direction of
(1, −2, 3) at (x, y, z) = (4, 3, −2).
Solution:
n = (1, −2, 3)/
√
14
,
and ∇u = (2 xy − 3 z, x2, −3 x)
at (4, 3, − 2) is (30, 16, − 12). So
∂u
∂n
=
30 − 32 − 36
√
14
= −
38
√
14
.
Identities among differential operators
∇·(αu + βv )
=
α∇·u + β∇·v,
(16)
∇( αu + βv)
=
α∇u + β∇v,
(17)
∇×( αu + βv)
=
α∇×u+ β∇×v,
(18)
∇·(uv)
=
∇u ·v + u ∇·v,
(19)
∇×(uv)
=
∇u ×v + u ∇×v,
(20)
∇·( u ×v)
=
v ·∇×u − u ·∇×v,
(21)
∇×( u ×v)
=
u ∇·v − v ∇·u + ( v·∇)u − (u·∇) v,
(22)
∇(u ·v)
=
(u ·∇) v + (v ·∇) u+ u ×( ∇×v) + v ×( ∇×u),
(23)
∇·∇×v
=
0,
(24)
∇×∇u
=
0.
(25)
When proving various identities that involve vectors and their
derivatives (the divergence, gradient and curl), it is important to
remember that the nabla (∇) works as (1) a vector and as (2) a
differential operator ((uv)′ = u′v + uv′).
∇×∇u = 0.
The vector product of two identical vectors (∇×∇) is identically zero.
∇·∇×v = 0.
Using the identities of scalar triple product,
∇·∇×v
=
v ·∇×∇
=
∇×∇·v
=
0.
(26)
∇×(u ×v).
The vector triple product identity is
∇×(u ×v)
=
(∇·v) u −(∇·u) v.
(27)
Note that ∇ in the right hand side operates on both u and v
so (uv)′ = u′v + uv′ needs to be recursively applied. The first term
in the right hand side is expanded as



 Thus, the flow that goes out from the side at x = x is
Thus, the flow that goes out from the side at x = x is